Hey, I'm Nimish
MS Mechanical Engineering @ ASU
Mechanical & Thermal system design | CAD | AIT | Rapid Prototyping
Hi, I’m Nimish! My journey as an engineer has taken me from Mumbai to Tempe, where I’m currently pursuing my MS in Mechanical and Aerospace Engineering at Arizona State University. Previously, I earned my Bachelor’s in Mechanical Engineering from the University of Mumbai, and I’ve had the privilege of working as a Mechanical Engineer working on Propulsion systems at Inspecity Space Laboratories, where I contributed to the design, simulation, and testing of propulsion systems for CubeSat missions. I thrive on solving complex technical challenges—whether prototyping rocket engine components, fabricating lightweight ornithopter bodies, or developing custom parts for Formula Student racecars, I’ve leveraged additive manufacturing to rapidly iterate and bring innovative designs to life.
I thrive on solving complex technical challenges, blending hands-on fabrication with advanced CAD, FEA, and systems-level thinking. My experience spans mechanical and thermal systems, design for manufacturability, and the full engineering cycle—from concept to testing and validation. I enjoy collaborating with multidisciplinary teams and mentoring fellow engineers, always striving to combine analytical rigor with creative problem-solving.
Outside of engineering, you’ll find me exploring new technologies, hiking, or tinkering with side projects—anything that sparks curiosity and growth. Take a look at my projects or feel free to reach out if you’d like to connect!
Education
Arizona State University
MS Mechanical EngineeringUniversity of Mumbai
BS Mechanical Engineering
Graduate Student Assistant in Lab of Manufacturing Innovation @ ASU
Mechanical Engineer focused on Mechanical & Thermal Systems of Bi-prop combustion systems
Lead Chassis Engineer for University FSAE team
Undergraduate Fellow on EV Charging project
My Projects

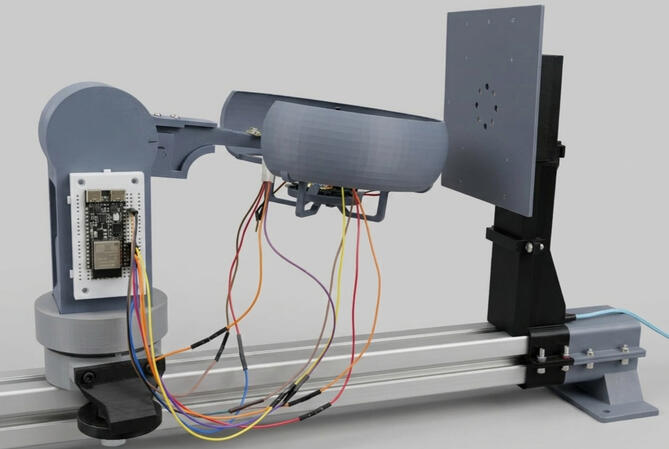
Tactile Sensing Mechanism

Bi-prop LRE

FSAE Race Car
Ornithopter

Structural Optimization

Bi-propellant Liquid Rocket Engine
Development
I had privilege of developing this working prototype of a bi-prop liquid engine that achieved a ground thrust of 1N within 10 months. This was a considerable achievement that required technical knowledge, hard work & good team collaboration.
Prototyping
In addition to developing the thruster body, we achieved the propellant feed system with self pressurizing propellants stored in the tanks and the entire injection system downstream. It enabled us to gain desired mass flow rates at adequate line pressures introduced into the C.C.
The entire process was Iterative with continuous improvment based on the accuracy of the system till achieving the desired characteristics. Combustion chamber, Injector geometries, feed line component selection were the tasks which required utmost attention and nowledge base. Determining the ideal combination of components that could perform desirably and consistently was challenging.

Realized Prop feed system
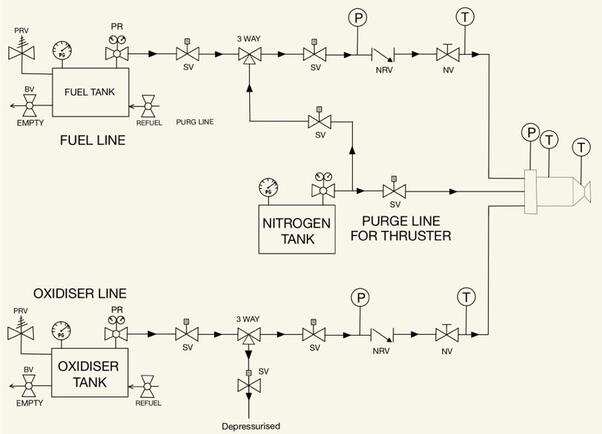
Schematic of Feed system

Testing & Validation
Our team of 4 engaged in numerous rounds of testing, evaluating Thruster's performance & making adjustments to achieve desired thrust output that is repeatable and verifiable.
Generated thrust outptuts recorded over a series of repeatable test fires were ran through a DAQ system and were plotted against time to determine their accuracy and precision.
")
All things considered, this project served as an excellent illustration of what can be accomplished when a group of disparate people band together to work toward a common objective. I'm really proud of what we achieved, and I think this experience has given us all important insights into the value of cooperation, teamwork, and the strength of creativity and teamwork.
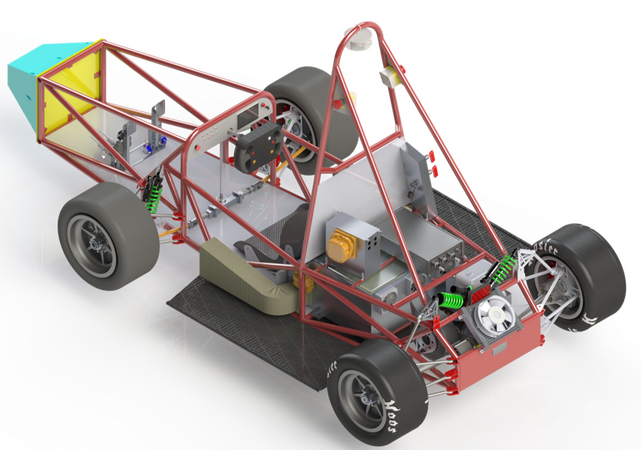
FSAE Car Chassis
Problem Statement
The competition challenges teams of university students to conceive, design, fabricate,develop and compete with small, F1 style, race cars. Team participated in the EV category of the competition and was tasked with realizing an FSAE Car using the rules & regulations defined by the competition authorities.

Product development
Team was divided into 4 departments where I had the opportunity to lead the Chassis design for the E08 CC22 car. My structural team designed and fabricated a Spaceframe chassis adhering to rules & regulations decided by Industry experts and by the authorities.
Design - Feedback loops were employed at each steps right from Initial ideation to Assembly - Integration - Testing which helped us stay on the correct path and avoid any last minute improvisations which is very common in Student teams.
Team maintained and submitted technical documentation for each subsystem namely Structural Equivalency Spreadsheet (SES), DFMEA document (Design Failure Mode Effect Analysis), Impact Attenuator document (IAD).



Awards

Winning Team


Testing and Successful runs
The FSAE electric vehicle underwent rigorous testing phases to ensure optimal performance and safety compliance. The spaceframe chassis design was validated through multiple testing procedures, including static load tests, torsional rigidity assessments, and dynamic testing on various track conditions. The team implemented systematic feedback loops throughout the testing process, documenting results in the Structural Equivalency Spreadsheet (SES) and Design Failure Mode Effect Analysis (DFMEA) to address potential issues. Impact attenuation testing was conducted to verify the vehicle's safety features, while electrical systems underwent comprehensive checks to meet EV category requirements. The final assembly successfully passed all technical inspections and safety requirements mandated by the competition authorities, demonstrating the effectiveness of the team's methodical approach to design, fabrication, and testing protocols.
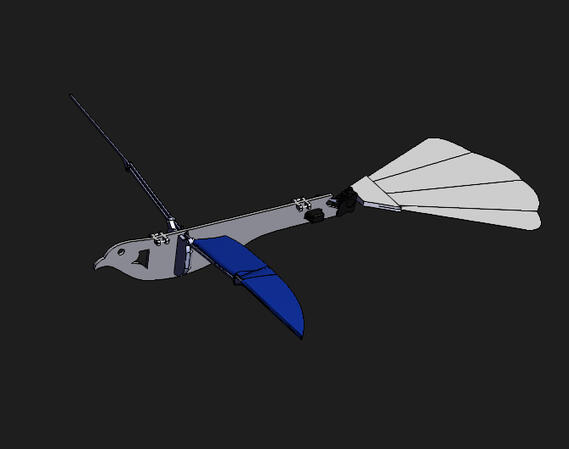
Flapping Wing Ornithopter
Development
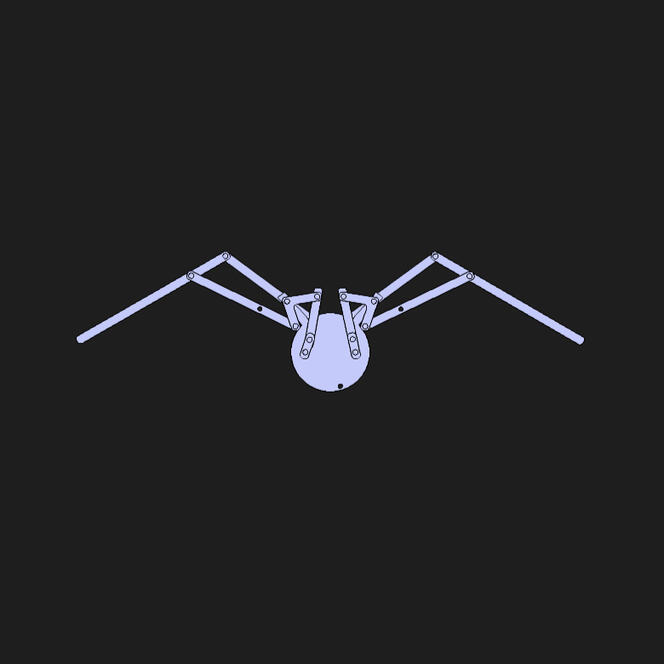
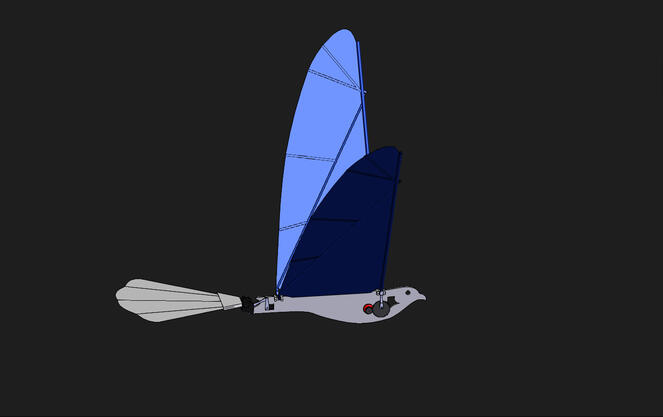
I engineered and manufactured a remotely operated flapping wing ornithopter as my undergraduate semester project. The primary goal was to mimic the gliding and rowing techniques of bird flight and address the challenge of low flight endurance in micro aerial vehicles (MAVs). The ornithopter was designed to serve as a “manoeuvrable scarecrow” for crop protection, with a focus on optimizing payload capacity, crash survivability, and ease of field repair. I led the design and fabrication of the airframe, integrating a servo-based dual crank gear mechanism and developing a custom Arduino-based flight control system for precise remote operation.
Prototyping
The ornithopter’s structure combined printed Nylon connectors, and custom 3D printed ABS fuselage, all designed in SolidWorks and fabricated using FDM printing. This approach enabled rapid iteration and significant weight reduction while maintaining structural integrity. The propulsion system featured a brushless DC outrunner motor, while . The electronics suite included an Arduino Uno for onboard control and a 2.4GHz wireless receiver for remote operation. I performed linkage stress analysis and simulated the assembly in ANSYS to validate the design before prototyping.

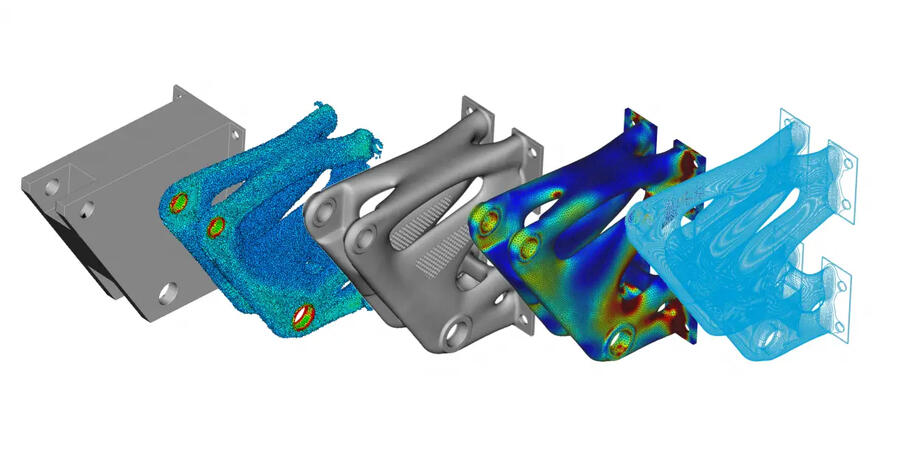
Multi-load Topology Optimization of Wheel Knuckle using Python based BESO framework in ABAQUS
Development
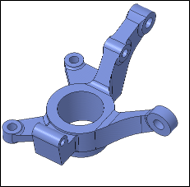
Steering Knuckle
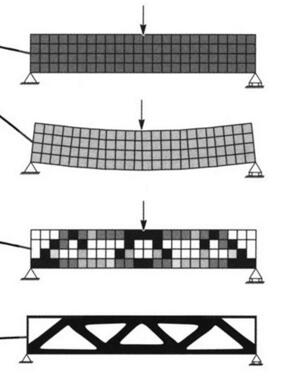
Finite element method

Function of topology optimization